DC-Motor Position/Velocity Control
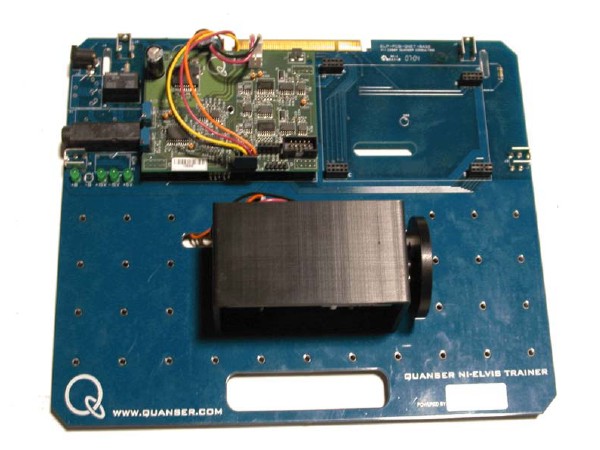
This DC Motor Control Trainer has been designed to illustrate the fundamentals of DC motor control. It can quickly and easily be configured for a range of hardware-in-the-loop experiments including system ID, speed and position control.
Control techniques studied:
- Position & Speed Control
- Disturbance Rejection
- Tracking Control & Regulation
- PID Controller Design
- Lead / Lag Compensation
- State-Feedback
- System Modeling & Simulation
- Frequency Analysis
- Phase & Gain Margin
- Root Locus Design
- Nyquist Stability
- Discrete Time Sampling
- System Identification
- Multivariable Control Design
- Haptics & Force Feedback
- Analog PID control
- Advanced digital control