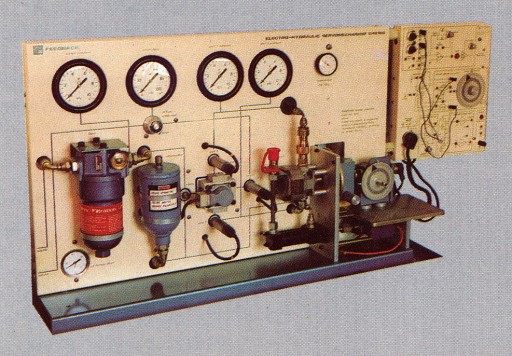
MEM02: Hydraulic Servomechanism
Closing a feedback loop around a rotary hydraulic actuator to obtain actuator shaft position that is pro- portional to a varying electrical signal is the most fundamental of mechanical control problems. In fact, this is called, “the basic regulator problem,” i.e., making the output position of a relatively massive device follow a low-power input signal by addition of position feedback and a power amplifier. Often the perfor- mance can be further improved by adding to the outer position feedback loop an inner velocity feedback loop. Since the position is often the angular position of a shaft, the angular velocity will be measured by a tachometer and the inner loop is then called the “tachometer f eedback loop.”